
开源代码,实验数据,视频展示: https://github.com/sssn-tech/Learn2Walk
Task0: Isaaclab环境配置
常见坑点
Isaaclab的初步环境搭建就涉及到非常多的坑点,这里列举一些。
这些坑点的主要原因是Isaaclab的官方文档将Isaacsim(Isaaclab的基础环境)的安装一笔带过了,官方给出了一个Isaacsim安装命令,但是没有作出解释和明确需求。
我强烈建议所有尝试安装Isaaclab的用户对照检查自身环境情况。逐点对照参考Isaacsim的官方需求文档:
https://docs.isaacsim.omniverse.nvidia.com/latest/installation/requirements.html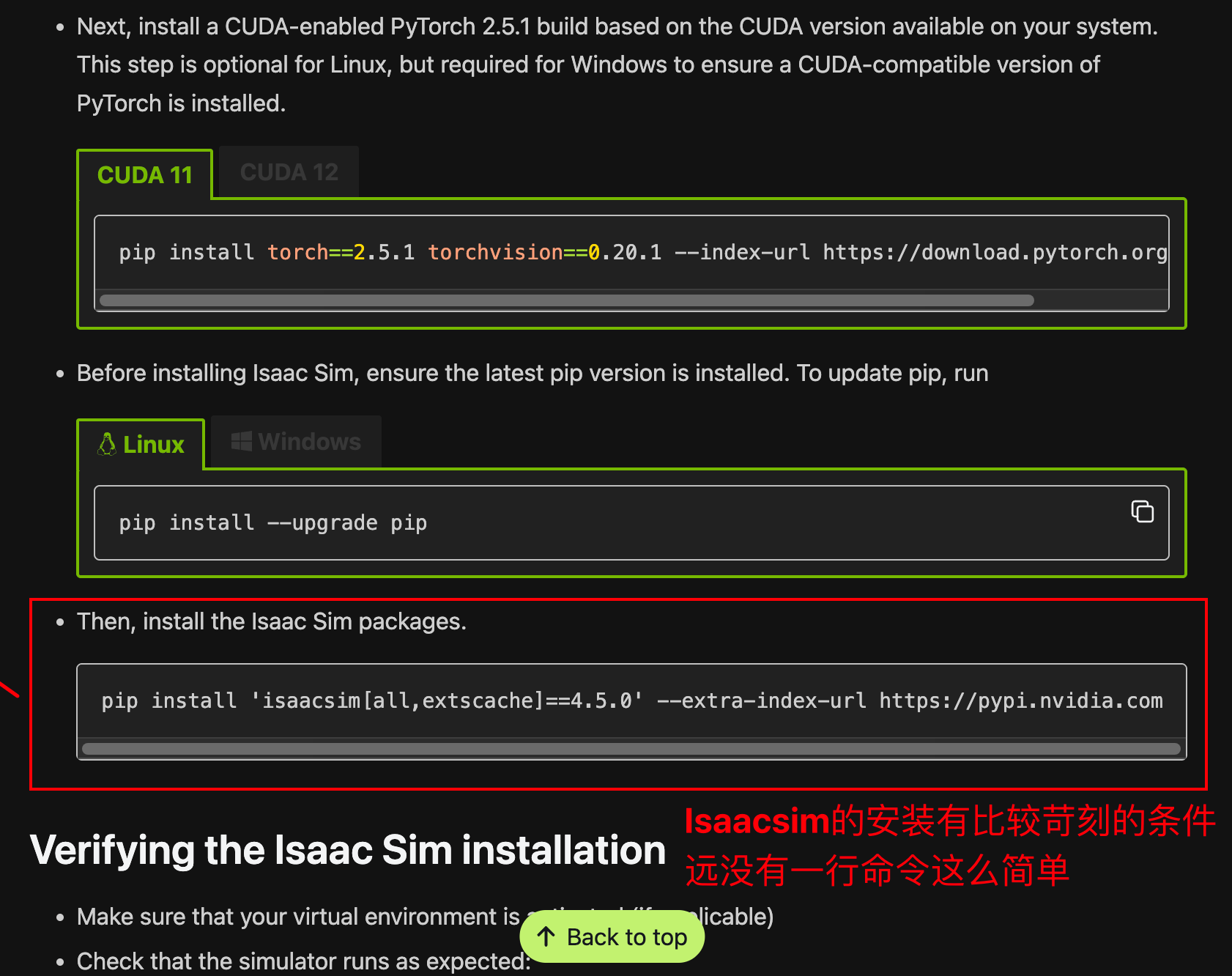
尝试在AutoDL这样的容器算力平台上搭建
尽管AutoDL官方没有告诉用户(文档里也没有),AutoDL的所有环境均存在于Docker之内,而不是完整的虚拟机。
Isaac Sim作为Isaaclab的必要基础,依赖于 CUDA、OptiX、RTX 等组件,必须要求:
- 宿主机支持 NVIDIA GPU 驱动
- Docker 容器使用
--gpus all并挂载/dev/nvidia*、nvidia-container-runtime等 - 安装特定版本的 NVIDIA 驱动、CUDA 工具包等
AutoDL 平台虽然支持 GPU,但不允许控制底层 NVIDIA 驱动和容器运行时配置,也不暴露相关接口。如果你尝试在AutoDL平台上安装Isaacsim,是可以成功安装的(无论是二进制,还是pip install)。但如果你尝试运行,会提示缺少驱动接口,或者缺少关键驱动文件。这通常可以在宿主环境内为Docker挂载,但AutoDL显然不允许用户访问宿主机。
[!NOTE]
尽管Isaaclab可以使用
--headless参数取消渲染,只运行仿真功能,但这个参数没有完全取消他对于GPU接口的底层依赖。因此,这个参数无法使它可以运行的环境要求放宽。这个参数的优化空间也许很大:目前仓库里还有弱交互,非交互式脚本的仿真脚本不能通过--headless运行。[!NOTE]
Isaaclab是一个比较新的产品,社区也仍在构建中。上述问题反映了Isaaclab在描述自身安装需求时候存在部分不清晰。在后面你还会看到,我遇到了Isaaclab官方脚本不完善, 和宇树官方脚本运行错误的问题。需要提出Issue,和开发者直接沟通。
尝试在Nvidia Tesla T4或者类似的GPU上搭建
Isaaclab必须RTX技术来支持底层功能,这在Tesla T4上行不通。同样的,--headless参数不能解决问题。
尝试在本地/远程的纯净Ubuntu上搭建
准备面对在Linux上安装Nvidia驱动这个被喷了无数年的,经久不衰的话题
- 假酒驱动,
nvidia-smi正常,但是用不了,知乎https://zhuanlan.zhihu.com/p/19148652598 - 换驱动导致暴毙,知乎
https://zhuanlan.zhihu.com/p/6518449814 - 安全启动毙掉驱动,Nvidia官方论坛
https://forums.developer.nvidia.com/t/nvidia-drivers-not-working-while-secure-boot-is-enabled-after-updating-to-ubuntu-24-04/305351 - Mock注册了,但是无效
- 装好了Nvidia驱动,重启一下发现网卡驱动挂了
你可能在想:
- 英伟达官网搜索显卡型号,下载
run.sh离线安装 - 依照自动建议安装
sudo ubuntu-drivers autoinstall - 在英伟达官网查表安装
sudo apt install nvidia-driver-525 - 更多看似规范,看似官方的安装
在经历长久的折磨后,我认为这个话题在互联网上被长久讨论是有自己的原因的,人生苦短,请找个成品驱动镜像用。

小结
以上是一些Isaaclab安装环境的常见坑点,我个人认为官方可以出一个小巧的脚本,用来检查当前所处的环境是否满足安装要求。让用户不必花费大量时间下载,部署,然后在运行过程中报错崩溃。或者最少的,也应该在官方文档中,Isaacsim的安装命令下注释需求文档地址。
软件安装
示例配置
从这里开始,我开始使用阿里云ECS作为试验环境。实例规格ecs.gn7i-c32g1.8xlarge:
- GPU:Nvidia A10
- CPU:32vCPU Intel(R) Xeon(R) Platinum 8369B CPU @ 2.90GHz
- 内存:32G,实际上过剩了
- 镜像:云市场镜像->搜索驱动+Ubuntu->选择v3

[!NOTE]
阿里云ECS能跑的本质原因是他是虚拟机,而不是Docker容器。
[!CAUTION]
不能觉得阿里驱动市场的镜像一定work,开机挂掉的比比皆是,但我挑的这个驱动和容器规格肯定没问题
安装流程
安装Isaacsim和Issaclab
阅读到这里,你应该已经可用的运行环境,这个环境
- GPU支持RTX,CUDA版本较新
- Nvidia驱动正常,不仅可以显示版本,还能往GPU迁移数据(可以参见上面的“假驱动”帖子)
- 级别为虚拟机,或者物理机
现在你可以按照Isaaclab官方文档的流程来安装软件,并尝试运行
- 安装Miniconda
- 创建一个python 3.10环境
- 安装Isaacsim
- 如果你是Ubuntu 22.04,你应该用
pip安装 - 如果你是Ubuntu 20.04,你应该用二进制安装
- 如果你是Ubuntu 22.04,你应该用
- 安装Isaaclab
git clone官方仓库conda activate [你的环境]chmod +x Issaclab.sh && Issaclab.sh --install
可以参照官方文档,文档已经有的流程就不赘述了
https://isaac-sim.github.io/IsaacLab/main/source/setup/installation/index.html更多配置
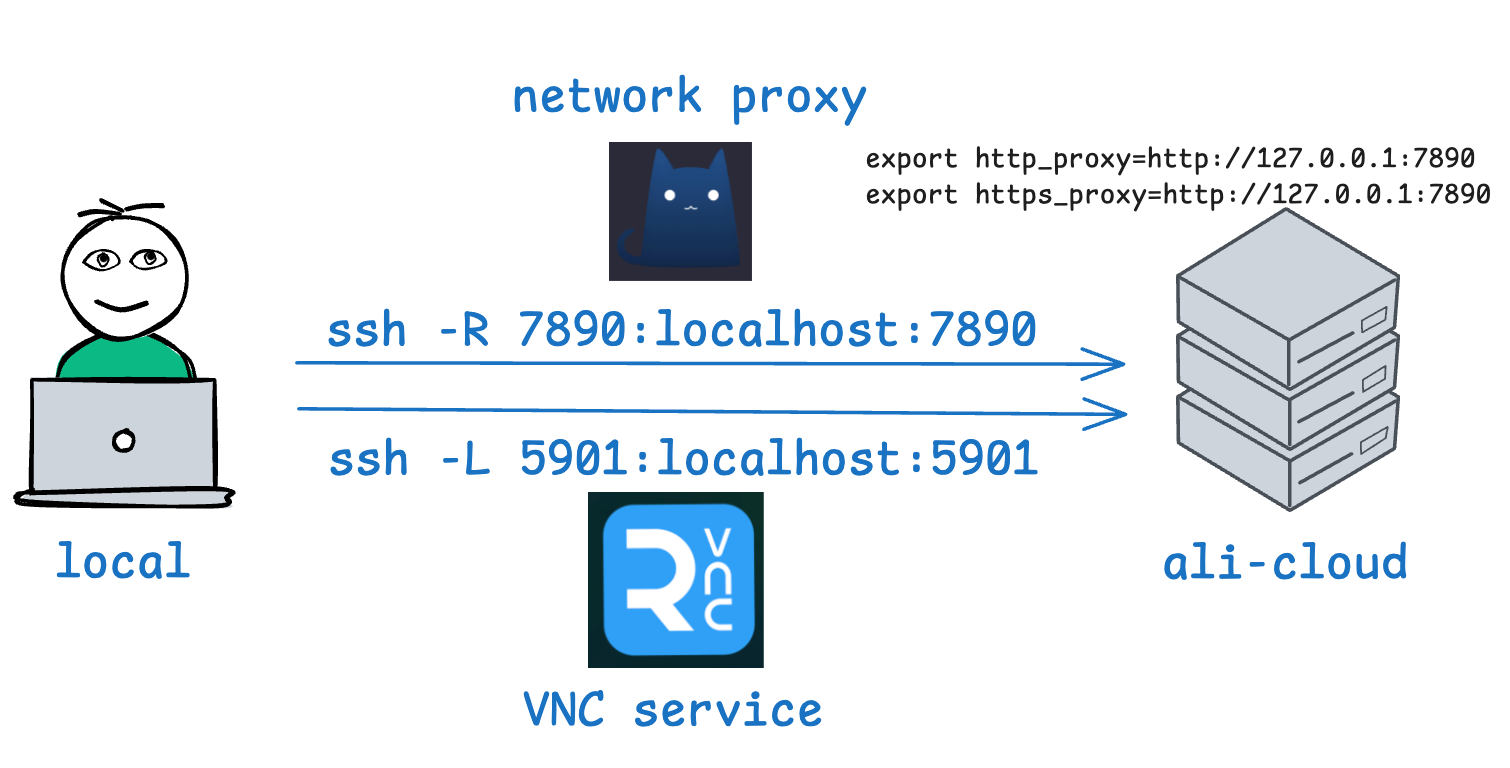
为了更方便的观测试验运行情况,你最好安装远程桌面软件,并配置网络代理。我在这里给出一个可行的解决方案:
[!CAUTION]
Isaaclab的很多脚本会调用网络资源,这些资源位于
http://omniverse-content-production.s3-us-west-2.amazonaws.com/Assets/Isaac/,网络代理是必须的
使用SSH隧道搭建两个核心服务:网络代理和VNC桌面的通道,用curl简要测试代理运行情况
(base) ecs-user@iZuf6g6vii5ci3ikxssy9lZ:~$ source ~/proxy-on.sh 7899
127.0.0.1:7899
(base) ecs-user@iZuf6g6vii5ci3ikxssy9lZ:~$ curl google.com
<HTML><HEAD><meta http-equiv="content-type" content="text/html;charset=utf-8">
<TITLE>301 Moved</TITLE></HEAD><BODY>
<H1>301 Moved</H1>
The document has moved
<A HREF="http://www.google.com/">here</A>.
</BODY></HTML>Task1: 基础环境搭建
到这一步,你应该已经安装并测试好了Issaclab
要求
- 场景构建:
-
使用Isaac Sim创建10m×10m的室内平面场景(可选:增加障碍物/斜坡)
-
添加1个人形机器人(例如宇树H1/Go2等)
-
部署基础光源和物理材质
- 运动控制测试
-
通过Isaac Lab的Python API控制机器人完成基础动作
-
输出机器人完成站立动作的5秒关节角度变化曲线图
完成情况
- 全部完成,源码请参考仓库
- 基础环境内含几个基本几何物体,机器人使用G1,有默认光源和材质
- 开始仿真后,机器人单脚独立,全身执行小幅度的随机动作,“抽搐”着倒下
- 记录重要关节的弧度变化并打印成折线图
- 扩展内容:演示视频的录制
- 在一个单独的
.py脚本中录制视频竟然如此的难,调试难度可以排整个项目的前三 - 大模型的记忆都是老api,调教了一整天都无法从默认视角中抓取出照片
- 官方文档中的
beta: StageRecorder[1]用不了,未知原因,录制出的文件是空的 - 官方文档中的
ReplicatorBasicWriter[2]可以用,藏的有点深了,找了很久很久
- 在一个单独的
[1] https://isaac-sim.github.io/IsaacLab/main/source/how-to/record_animation.html
[2] https://isaac-sim.github.io/IsaacLab/main/source/how-to/save_camera_output.html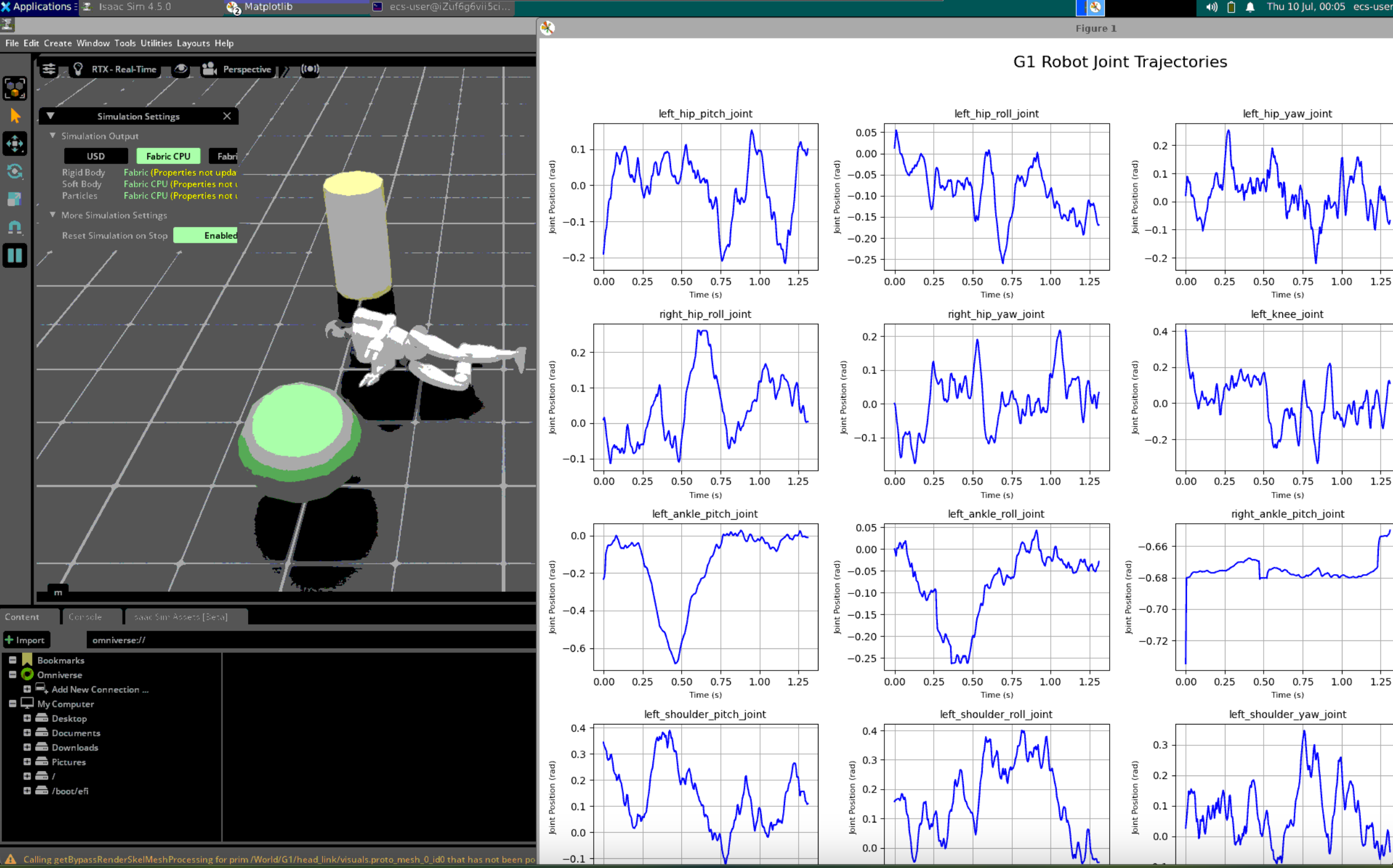
关键代码(随机动作部分)
for i, name in enumerate(joint_names):
set = False
# 跳过右腿关节(pitch方向)保持踢腿动作
if any(key in name for key in ["right_hip_pitch_joint", "right_knee_joint", "right_ankle_pitch_joint"]):
continue # 不修改踢腿姿态
# 匹配上肢关节
for key, (low, high) in upper_body_joint_ranges.items():
if key in name:
joint_pos[:, i] = torch.rand(1, device=sim.device) * (high - low) + low
set = True
break
# 匹配下肢关节
if not set:
for key, (low, high) in lower_body_joint_ranges.items():
if key in name:
joint_pos[:, i] = torch.rand(1, device=sim.device) * (high - low) + low
set = True
break
# 如果没有匹配到任何设置,则使用默认小幅扰动
if not set:
joint_pos[:, i] = torch.rand(1, device=sim.device) * 0.2 - 0.1 # [-0.1, 0.1]Task2: 复现宇树机器人行走
要求
目标:基于宇树开源代码实现H1机器人行走策略复现
- 代码部署与训练
-
使用宇树官方提供的强化学习示例
-
解析奖励函数设计:速度跟踪奖励;步态对称性惩罚等
完成情况
- 全部完成,其中主要复现两部分实验
- 宇树官方仓库:
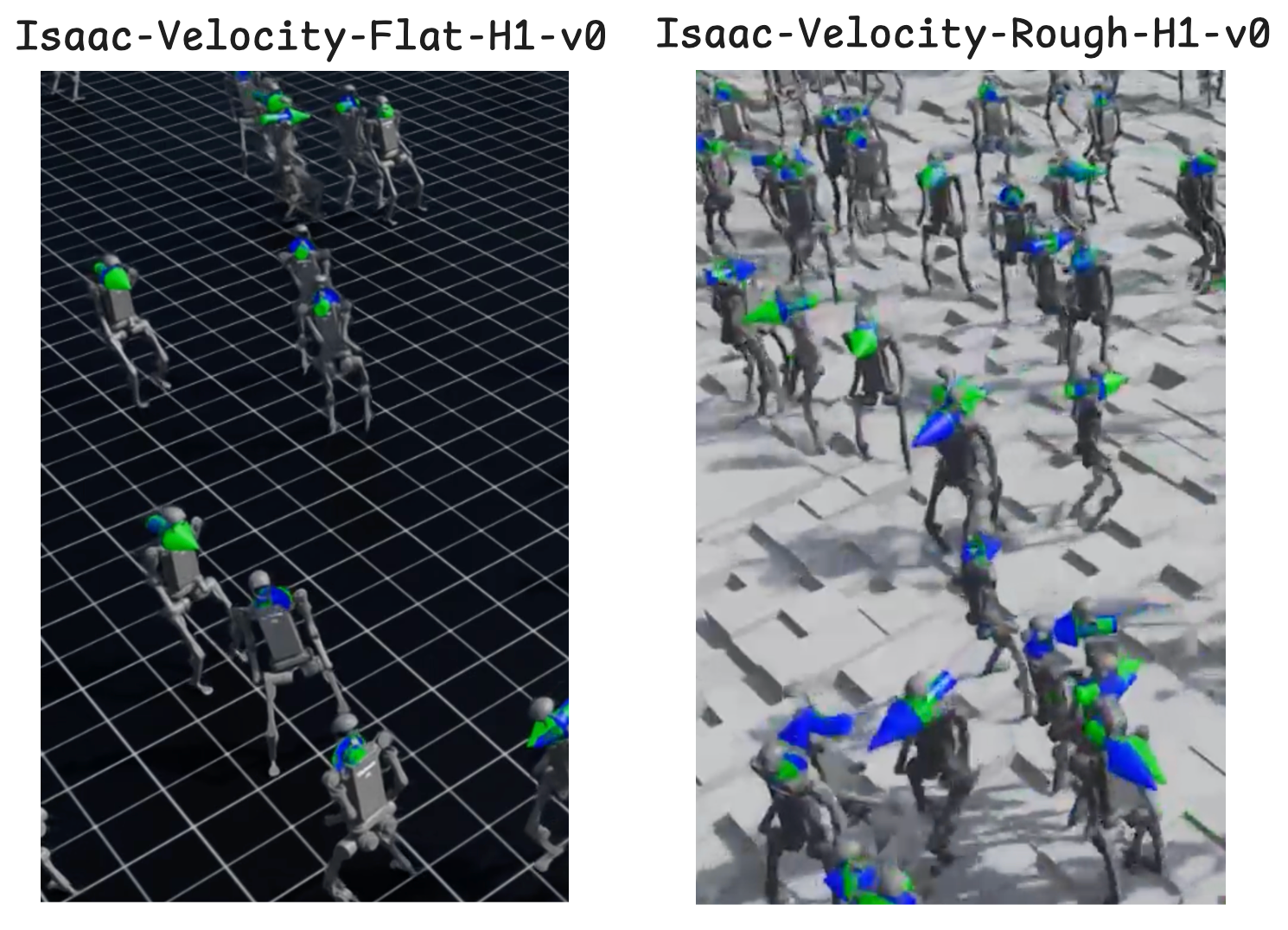
https://github.com/unitreerobotics/unitree_rl_lab - Isaaclab的新版本也包含宇树机器人行走:
https://isaac-sim.github.io/IsaacLab/main/source/overview/environments.html#locomotion
- 宇树官方仓库:
- 扩展内容:发现了一个宇树官方代码的bug,提交issue并解决
- 扩展内容:发现了一个Issaclab官方代码的bug,提交issue并解决
拓展内容
[!CAUTION]
宇树官方仓库的代码存在的训练数值崩溃的问题
...
File "/home/ecs-user/miniconda3/envs/is/lib/python3.10/site-packages/torch/distributions/normal.py", line 73, in sample
return torch.normal(self.loc.expand(shape), self.scale.expand(shape))
RuntimeError: normal expects all elements of std >= 0.0这是因为在 PyTorch 中,torch.distributions.Normal(loc, scale) 是一个正态分布,其 scale(标准差)必须是 非负数。
但是模型中 scale 出现了负值或 NaN,导致 torch.normal(...) 抛出异常。
这可能和梯度爆炸,数值不稳定,没有剪裁梯度有关。
我提交了issue[1] ,收到回复说问题在最近一次的commit修复了。
- 我在7-7克隆的代码,在7-9遇到的问题
- 修复的commit日期是7-8,可以说是非常巧了
[1] https://github.com/unitreerobotics/unitree_rl_lab/issues/7[!CAUTION]
Isaaclab官方代码中,教程脚本有点小毛病
(is) ecs-user@iZuf6g6vii5ci3ikxssy9lZ:~/IsaacLab$ ./isaaclab.sh -p scripts/demos/h1_locomotion.py --headless
...
Traceback (most recent call last):
File "/home/ecs-user/IsaacLab/scripts/demos/h1_locomotion.py", line 50, in <module>
from omni.kit.viewport.utility import get_viewport_from_window_name
ModuleNotFoundError: No module named 'omni.kit.viewport'遇到问题的时候没什么想法,提交了Issue[1]
- 收到回复说这个教程脚本是交互式的,不能添加
--headless参数 - 但是所有同一目录下的脚本都可以
--headless,开发者说会添加一个报错,提醒这个脚本不能加
[1] https://github.com/isaac-sim/IsaacLab/issues/2858奖励函数设计
奖励函数的代码位于:
source/unitree_rl_lab/unitree_rl_lab/tasks/locomotion/robots/h1/velocity_env_cfg.py
238-338行每一项奖励都是一个 RewTerm 实例,它包含:
func: 奖励函数,实现具体的行为评估逻辑weight: 权重,表示该项奖励对总奖励的影响程度(正值鼓励、负值惩罚)params: 可选参数,用于配置奖励函数的行为
总共有这些实例:
任务相关的奖励:奖励完成任务(跟随目标速度)
track_lin_vel_xy
- 目的:鼓励机器人在XY平面上追踪目标线速度。
- 权重:1.0(较高,表明这是核心任务)
track_ang_vel_z
- 目的:鼓励机器人跟踪目标的角速度(绕Z轴旋转)。
- 权重:0.5(次重要)
alive
- 目的:鼓励机器人保持“存活”(例如不摔倒、维持平衡)。
- 权重:0.15(维持基本稳定性)
基础运动的奖励(运动状态相关)
base_linear_velocity
- 目的:惩罚垂直方向上的速度(Z轴),鼓励稳定。
- 权重:-2.0(惩罚力度较大)
base_angular_velocity
- 目的:惩罚绕XY轴的角速度,避免机器人剧烈晃动。
- 权重:-0.5
joint_acc
- 目的:惩罚关节加速度,鼓励平滑运动。
- 权重:-2.5e-7(非常小,次要惩罚)
action_rate
- 目的:惩罚动作变化率,鼓励连续平滑的动作。
- 权重:-0.05
dof_pos_limits
- 目的:惩罚关节位置超出限制。
- 权重:-5.0(较高惩罚)
关节偏差奖励(惩罚不合理的关节)
joint_deviation_arms
- 目标:肩膀、肘部等手臂关节
- 权重:-1.0
- 正则表达式:匹配肩、肘关节的名字
joint_deviation_torso
- 目标:躯干关节
- 权重:-1.0
joint_deviation_hips
- 目标:臀部连接的髋关节
- 权重:-1.0
机器人姿态奖励:鼓励直立,惩罚水平
flat_orientation_l2
- 目的:惩罚机器人姿态偏离水平(例如倾斜)
- 权重:-1.0
base_height
- 目的:鼓励机器人维持一个目标高度(0.9米)
- 权重:-10.0(非常重要)
足部奖励
gait
- 目的:鼓励机器人形成自然步态(如对称步频)
- 权重:0.5
feet_slide
- 目的:惩罚脚接触地面时滑动,鼓励稳定着地
- 权重:-0.2
feet_clearance
- 目的:鼓励抬脚时有一定高度,防止绊倒
- 权重:20.0(非常高,重要性大)
feet_contact_forces
- 目的:惩罚异常的大脚部接触力(可能表示撞击)
- 权重:-0.0002(惩罚轻微)
其他
undesired_contacts
- 目的:惩罚除脚以外的身体与地面接触(例如手、膝盖碰地)。
- 权重:-1.0(防止摔倒等)
Task3:跨平台步态迁移
要求
目标:将训练策略迁移至其他人形机器人
模型适配
-
导入第三方机器人URDF文件(需对齐关节命名规范,如.*_hip_pitch)
-
调整动力学参数:例如关节力矩限制(第三方机器人电机扭矩可能低于宇树H1)/腿部质量分布
完成情况
- 全部完成
- 将上文中训练好的宇树H1行走策略迁移至宇树G1上
- 使用代码探针分析H1和G1的关节,对照分析.usd文件
- 对于输出(动作),建立H1到G1的关节映射表
- 对于输入(观测),重排G1的关节顺序,对齐H1策略的输入维度和顺序
- 修改G1的设置(初始站姿,力矩)适配H1策略
- 流程:G1观测->转换为H1观测->输入H1策略->得到H1动作(关节动作表)->映射为G1动作
使用代码探针分析机器人建模,得到动作映射表
我们可以找到
source/isaaclab_tasks/isaaclab_tasks/manager_based/locomotion/velocity/velocity_env_cfg.py
109行开始
...
@configclass
class ActionsCfg:
"""Action specifications for the MDP."""
joint_pos = mdp.JointPositionActionCfg(asset_name="robot", joint_names=[".*"], scale=0.5, use_default_offset=True)这里定义了动作输出时所有关节。为了提高扩展性,这个定义几乎没有我们可以参考的地方,我们要使用代码探针分析运行时环境的构造
[!NOTE]
选择
rsl_rl的理由只是因为大部分环境都提供了它的训练入口
修改rsl库的训练代码, 他位于:
scripts/reinforcement_learning/rsl_rl/train.py加入代码探针,这是一个运行时参数--extract,代表不训练,而是分析环境内容
这个参数:
- 在嵌套的环境中递归搜索名为名为
robot的对象,如果找到,打印它的关节顺序,这将用来对齐动作空间(网络输出) - 提取一次观测,即
observation,打印形状,这将用来对齐观测空间(网络输入)
...
# 新增:提取信息的操作
parser.add_argument("--extract", action="store_true", default=False, help="Extract joint names & observations and exit.")
...
# 如果启用了 --extract 参数,则只提取关节并退出
if args_cli.extract:
def find_robot(env): #在嵌套环境中递归的寻找名为robot的对象
max_depth = 10
for _ in range(max_depth):
if hasattr(env, "scene"):
if hasattr(env.scene, "robot"):
return env.scene.robot
if hasattr(env.scene, "articulations") and "robot" in env.scene.articulations:
return env.scene.articulations["robot"]
if hasattr(env, "envs"):
env = env.envs[0]
elif hasattr(env, "env"):
env = env.env
elif hasattr(env, "unwrapped"):
env = env.unwrapped
else:
break
raise AttributeError("Could not find robot in environment.")
robot = find_robot(env)
joint_names = robot.joint_names
print("Extracted joint names:")
for name in joint_names: # 找到的robot,打印关节顺序
print(name)使用探针可以分析得到H1和G1的关节全称,其中H1有19个关节,G1有37个,分别是
h1_joint_names = ["left_hip_yaw", "right_hip_yaw", "torso", "left_hip_roll", "right_hip_roll", "left_shoulder_pitch", "right_shoulder_pitch", "left_hip_pitch", "right_hip_pitch", "left_shoulder_roll", "right_shoulder_roll", "left_knee", "right_knee", "left_shoulder_yaw", "right_shoulder_yaw", "left_ankle", "right_ankle", "left_elbow", "right_elbow"]
g1_joint_names = ["left_hip_pitch_joint", "right_hip_pitch_joint", "torso_joint", "left_hip_roll_joint", "right_hip_roll_joint", "left_shoulder_pitch_joint", "right_shoulder_pitch_joint", "left_hip_yaw_joint", "right_hip_yaw_joint", "left_shoulder_roll_joint", "right_shoulder_roll_joint", "left_knee_joint", "right_knee_joint", "left_shoulder_yaw_joint", "right_shoulder_yaw_joint", "left_ankle_pitch_joint", "right_ankle_pitch_joint", "left_elbow_pitch_joint", "right_elbow_pitch_joint", "left_ankle_roll_joint", "right_ankle_roll_joint", "left_elbow_roll_joint", "right_elbow_roll_joint", "left_five_joint", "left_three_joint", "left_zero_joint", "right_five_joint", "right_three_joint", "right_zero_joint", "left_six_joint", "left_four_joint", "left_one_joint", "right_six_joint", "right_four_joint", "right_one_joint", "left_two_joint", "right_two_joint"][!IMPORTANT]
上面的关节顺序表是有序的!他的顺序和策略输出维度一一对应
我们再将模型的结构打印出来,验证上文得到的关节数目
H1的Actor网络
Actor MLP: Sequential(
(0): Linear(in_features=69, out_features=128, bias=True)
(1): ELU(alpha=1.0)
(2): Linear(in_features=128, out_features=128, bias=True)
(3): ELU(alpha=1.0)
(4): Linear(in_features=128, out_features=128, bias=True)
(5): ELU(alpha=1.0)
(6): Linear(in_features=128, out_features=19, bias=True)
)G1的Actor网络
Actor MLP: Sequential(
(0): Linear(in_features=123, out_features=256, bias=True)
(1): ELU(alpha=1.0)
(2): Linear(in_features=256, out_features=128, bias=True)
(3): ELU(alpha=1.0)
(4): Linear(in_features=128, out_features=128, bias=True)
(5): ELU(alpha=1.0)
(6): Linear(in_features=128, out_features=37, bias=True)
)可以看到输出维度是19和37,这与我们得到的关节数目匹配,说明我们的关节数目没问题。
[!NOTE]
打印网络不仅可以得到输出维度(关节数目),还得到了输入维度(观测维度),本节主要是分析关节的对齐,观测的对齐在下一节阐述
现在我们可以再确认一下关节结构,并顺带获取机器人的.usd建模文件。
我用到一个有趣的工程技巧:Isaaclab的官方仓库里没有机器人的.usd文件,但他能正常完成训练,这说明他大概率调用了网络上的资源。我们可以手动断网,清理缓存,然后运行训练,等待连接超时报错:
(is) ecs-user@iZuf6g6vii5ci3ikxssy9lZ:~/IsaacLab$ source ~/proxy-on.sh 9999 # 设置一个不存在的代理
127.0.0.1:9999
(is) ecs-user@iZuf6g6vii5ci3ikxssy9lZ:~/IsaacLab$ curl baidu.com # 确认一下网络是否真的失效了
curl: (7) Failed to connect to 127.0.0.1 port 9999 after 0 ms: Connection refused
(is) ecs-user@iZuf6g6vii5ci3ikxssy9lZ:~/IsaacLab$ python scripts/reinforcement_learning/rsl_rl/train.py --task=Isaac-Velocity-Flat-G1-v0 --headless
...
File "/home/ecs-user/IsaacLab/source/isaaclab/isaaclab/sim/spawners/from_files/from_files.py", line 66, in spawn_from_usd
return _spawn_from_usd_file(prim_path, cfg.usd_path, cfg, translation, orientation)
File "/home/ecs-user/IsaacLab/source/isaaclab/isaaclab/sim/spawners/from_files/from_files.py", line 237, in _spawn_from_usd_file
raise FileNotFoundError(f"USD file not found at path: '{usd_path}'.")
FileNotFoundError: USD file not found at path: 'http://omniverse-content-production.s3-us-west-2.amazonaws.com/Assets/Isaac/4.5/Isaac/IsaacLab/Robots/Unitree/G1/g1_minimal.usd'.在等待数分钟后,python抛出了一个找不到文件的异常,我们看到这个模型文件是
http://omniverse-content-production.s3-us-west-2.amazonaws.com/Assets/Isaac/4.5/Isaac/IsaacLab/Robots/Unitree/G1/g1_minimal.usd这正是我们要找的.usd文件!我们可以写一个脚本分析他的结构:
def explore_usd_file(path):
stage = Usd.Stage.Open(path)
if not stage:
print(f"Failed to open {path}")
return
print(f"\n--- Exploring: {path} ---")
# 遍历所有 Prim(物体节点)
for prim in stage.Traverse():
print(f"Prim: {prim.GetPath()} Type: {prim.GetTypeName()}")
# 示例:如果是 Mesh,打印点数
if prim.GetTypeName() == "Mesh":
mesh = UsdGeom.Mesh(prim)
points_attr = mesh.GetPointsAttr()
points = points_attr.Get()
print(f" Mesh with {len(points)} points")然后可以得到
--- Exploring: /home/ecs-user/working-labs/H1transferG1/assets/g1_minimal.usd ---
Prim: /physicsScene Type: PhysicsScene
Prim: /g1 Type: Xform
Prim: /g1/pelvis Type: Xform
Prim: /g1/pelvis/visuals Type:
Prim: /g1/pelvis/left_hip_pitch_joint Type: PhysicsRevoluteJoint
Prim: /g1/pelvis/pelvis_contour_joint Type: PhysicsFixedJoint
Prim: /g1/pelvis/right_hip_pitch_joint Type: PhysicsRevoluteJoint
...这就是详细的结构了,我们可以对照上面的列表分析关节,此外,我们将.usd文件下载到了本地,这在下面的工作中非常有用。
在得到关节命名后,我们可以建立H1到G1的关节映射表。因为G1的关节比H1更多,我们将冗余的自由度全部设为0。
[!NOTE]
回顾一下流程:
G1观测->转换为H1观测->输入H1策略->得到H1动作(关节动作表)->映射为G1动作这说明我们只需要H1到G1的单向关节映射,而不需要G1到H1的
H1_TO_G1_JOINT_MAP = {
# 下肢(左腿)
"left_hip_yaw": "left_hip_yaw_joint",
"left_hip_roll": "left_hip_roll_joint",
"left_hip_pitch": "left_hip_pitch_joint",
"left_knee": "left_knee_joint",
"left_ankle": "left_ankle_pitch_joint",
# G1多出的踝关节roll
"left_ankle_roll_joint": 0.0,
# 下肢(右腿)
"right_hip_yaw": "right_hip_yaw_joint",
"right_hip_roll": "right_hip_roll_joint",
"right_hip_pitch": "right_hip_pitch_joint",
"right_knee": "right_knee_joint",
"right_ankle": "right_ankle_pitch_joint",
# G1多出的踝关节roll
"right_ankle_roll_joint": 0.0,
# 躯干
"torso": "torso_joint",
# 上肢(左臂)
"left_shoulder_pitch": "left_shoulder_pitch_joint",
"left_shoulder_roll": "left_shoulder_roll_joint",
"left_shoulder_yaw": "left_shoulder_yaw_joint",
"left_elbow": "left_elbow_pitch_joint",
# G1多出的肘关节roll
"left_elbow_roll_joint": 0.0,
# 上肢(右臂)
"right_shoulder_pitch": "right_shoulder_pitch_joint",
"right_shoulder_roll": "right_shoulder_roll_joint",
"right_shoulder_yaw": "right_shoulder_yaw_joint",
"right_elbow": "right_elbow_pitch_joint",
# G1多出的肘关节roll
"right_elbow_roll_joint": 0.0,
}有了这张完整的关节映射表,我们可以写出H1到G1的动作映射函数。
[!IMPORTANT]
下面的动作映射函数正确前提是关节名列表有序,这需要和神经网络输出做一一对应。这也是为什么上文花了那么多功夫确认关节列表顺序。
def map_h1_action_to_g1(h1_action, h1_joint_names=h1_joint_names, g1_joint_names=g1_joint_names):
# H1关节名到action值的映射
h1_action_dict = dict(zip(h1_joint_names, h1_action))
g1_action = []
for g1_joint in g1_joint_names:
# 反查映射表,找到H1关节名
h1_key = None
for k, v in H1_TO_G1_JOINT_MAP.items():
if v == g1_joint:
h1_key = k
break
if h1_key is not None and h1_key in h1_action_dict:
g1_action.append(h1_action_dict[h1_key])
elif g1_joint in H1_TO_G1_JOINT_MAP and H1_TO_G1_JOINT_MAP[g1_joint] == 0.0:
g1_action.append(0.0)
else:
# 其它G1关节(如手指等),也补零
g1_action.append(0.0)
return g1_action至此,我们得到了关键函数map_h1_action_to_g1,这解决了迁移流程中重要的部分:将H1策略模型的输出应用在G1上。
使用代码探针分析观测数据构造,得到观测映射表
注意到
source/isaaclab_tasks/isaaclab_tasks/manager_based/locomotion/velocity/velocity_env_cfg.py
116行开始@configclass
class ObservationsCfg:
"""Observation specifications for the MDP."""
@configclass
class PolicyCfg(ObsGroup):
"""Observations for policy group."""
# observation terms (order preserved)
base_lin_vel = ObsTerm(func=mdp.base_lin_vel, noise=Unoise(n_min=-0.1, n_max=0.1))
base_ang_vel = ObsTerm(func=mdp.base_ang_vel, noise=Unoise(n_min=-0.2, n_max=0.2))
projected_gravity = ObsTerm(
func=mdp.projected_gravity,
noise=Unoise(n_min=-0.05, n_max=0.05),
)
velocity_commands = ObsTerm(func=mdp.generated_commands, params={"command_name": "base_velocity"})
joint_pos = ObsTerm(func=mdp.joint_pos_rel, noise=Unoise(n_min=-0.01, n_max=0.01))
joint_vel = ObsTerm(func=mdp.joint_vel_rel, noise=Unoise(n_min=-1.5, n_max=1.5))
actions = ObsTerm(func=mdp.last_action)
height_scan = ObsTerm(
func=mdp.height_scan,
params={"sensor_cfg": SceneEntityCfg("height_scanner")},
noise=Unoise(n_min=-0.1, n_max=0.1),
clip=(-1.0, 1.0),
)
def __post_init__(self):
self.enable_corruption = True
self.concatenate_terms = True
# observation groups
policy: PolicyCfg = PolicyCfg()这个配置文件定义了观测的一般形式:
| 观测项 | 说明 |
|---|---|
base_lin_vel, base_ang_vel |
当前的运动状态 |
projected_gravity |
姿态估计 |
velocity_commands |
想要达到的速度(任务目标) |
joint_pos, joint_vel |
运动系统的状态 |
actions |
历史动作(用于构建记忆) |
height_scan |
地形信息 |
然而,仅仅知道这些是不足以构建观测映射表的。我们仍需要在训练代码中加入探针,打印出来看一下
# 沿用上一节提到的--extrat参数
# ====== 新增:提取 observation 示例和 shape ======
obs = env.reset()
import numpy as np
print("\nExtracted observation structure:")
if isinstance(obs, (tuple, list)) and len(obs) > 0 and isinstance(obs[0], dict) and 'policy' in obs[0]:
policy_obs = obs[0]['policy']
print(f"policy: shape={policy_obs.shape} dtype={getattr(policy_obs, 'dtype', type(policy_obs))}")
# 打印第一个环境的 observation 向量
arr = policy_obs[0].detach().cpu().numpy() if hasattr(policy_obs[0], 'detach') else np.array(policy_obs[0])
print(f" First row (len={len(arr)}): {arr}")
print(f" First 20 values: {arr[:20]}")
if hasattr(policy_obs, 'detach'):
policy_obs = policy_obs.detach().cpu().numpy()
print("Index\t[9]\t\t[10]\t\t[11]\t\t[12]")
for i in range(10):
print(f"{i:>5}\t{policy_obs[i][9]:.6f}\t{policy_obs[i][10]:.6f}\t{policy_obs[i][11]:.6f}\t{policy_obs[i][12]:.6f}")
else:
print("Observation type/structure not recognized. Raw output:", obs)
# ====== 新增结束 ======现在我们打印一下H1的观测空间
Extracted observation structure:
policy: shape=torch.Size([4096, 69]) dtype=torch.float32
First row (len=69): [-5.6066342e-02 -8.7517925e-02 4.9868785e-02 -9.6398674e-02
-1.9630268e-01 -1.1851498e-01 2.4278294e-02 3.7880894e-02
-1.0474691e+00 3.5836050e-01 0.0000000e+00 -4.6731085e-01
8.4095336e-03 -8.9571215e-03 -4.2297798e-03 4.5316387e-03
-8.4742559e-03 3.4465501e-03 8.2933642e-03 3.7253592e-03
7.2544329e-03 -9.4385361e-03 4.5920312e-03 -6.5772794e-05
-2.6932871e-03 -5.2364785e-03 8.4291194e-03 9.6111558e-03
8.7782890e-03 7.7467002e-03 -6.2260972e-03 -1.2100315e+00
5.8564234e-01 -4.7681594e-01 -7.0546228e-01 1.3577251e+00
3.5666263e-01 2.7153444e-01 -1.3317013e-01 -3.0642664e-01
-1.2162994e+00 -3.2588577e-01 -4.4944549e-01 -6.0138190e-01
-5.8937967e-01 -2.3791862e-01 9.6854997e-01 1.4231379e+00
5.8026981e-01 7.4255371e-01 0.0000000e+00 0.0000000e+00
0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00
0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00
0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00
0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00
0.0000000e+00]
First 20 values: [-0.05606634 -0.08751792 0.04986878 -0.09639867 -0.19630268 -0.11851498
0.02427829 0.03788089 -1.0474691 0.3583605 0. -0.46731085
0.00840953 -0.00895712 -0.00422978 0.00453164 -0.00847426 0.00344655
0.00829336 0.00372536]
Index [9] [10] [11] [12]
0 0.358360 0.000000 -0.467311 0.008410
1 0.298718 0.000000 -0.848940 -0.000898
2 0.329300 0.000000 -0.413140 -0.008372
3 0.396957 0.000000 0.005005 -0.004949
4 0.635064 0.000000 0.069569 -0.008066
5 0.414920 0.000000 0.000215 0.006416
6 0.253440 0.000000 -0.763752 -0.002671
7 0.801332 0.000000 -0.484505 0.003594
8 0.278513 0.000000 0.841860 0.001726
9 0.966565 0.000000 -0.863862 0.000334shape=torch.Size([4096, 69])代表了H1的观测空间是69维的。还记得上节中提到的Actor网络吗?H1的Actor网络是
Actor MLP: Sequential(
(0): Linear(in_features=69, out_features=128, bias=True)
(1): ELU(alpha=1.0)
(2): Linear(in_features=128, out_features=128, bias=True)
(3): ELU(alpha=1.0)
(4): Linear(in_features=128, out_features=128, bias=True)
(5): ELU(alpha=1.0)
(6): Linear(in_features=128, out_features=19, bias=True)
)太好了,这证明我们的结论没有问题。
我们需要具体的观测构造方法,但是代码高度抽象,打印出来也无济于事。我们可以总结一下上文,汇总一下已知信息
- H1有19个关节,观测空间69维
- G1有37个关节,观测空间123维
- 观测空间按照顺序,分别是base_lin_vel, base_ang_vel, projected_gravity, velocity_commands, joint_pos, joint_vel, actions
当关节数目已知时,joint_pos,joint_vel, actions的维度就已知了,加之常见的速度一般是2维或者3维,我们可以解方程+合理猜测
H1的观测空间
[0:3] base_lin_vel (3)
[3:6] base_ang_vel (3)
[6:9] projected_gravity (3)
[9:12] velocity_commands (3)
[12:31] joint_pos (19)
[31:50] joint_vel (19)
[50:69] actions (19)G1的观测空间
[0:3] base_lin_vel (3)
[3:6] base_ang_vel (3)
[6:9] projected_gravity (3)
[9:12] velocity_commands (3)
[12:49] joint_pos (37)
[49:86] joint_vel (37)
[86:123] actions (37)这是一个非常合理的观测结构!现在我们可以开始写观测映射函数:
def map_g1_obs_to_h1_obs(policy_obs_row, g1_joint_names=g1_joint_names, h1_joint_names=h1_joint_names):
"""
将G1环境的policy observation向量,重排为H1策略可用的输入格式。
Args:
policy_obs_row: G1环境输出的单个环境的policy observation
g1_joint_names: G1机器人的关节名称列表
h1_joint_names: H1机器人的关节名称列表
Returns:
h1_obs: 重排后符合H1策略输入格式的observation向量
"""
# 创建输出向量,初始为空
h1_obs = []
# 1. 前12维直接复制 [0:12] (base_lin_vel, base_ang_vel, projected_gravity, velocity_commands)
h1_obs.extend(policy_obs_row[0:12])
# 2. 重排joint_pos部分 [12:49] -> [12:31]
g1_joint_pos = policy_obs_row[12:49] # G1的37个关节位置
g1_joint_pos_dict = dict(zip(g1_joint_names, g1_joint_pos)) # 构建G1关节名到位置的映射
# 为H1创建关节位置部分
h1_joint_pos = []
for h1_joint in h1_joint_names:
# 找到对应的G1关节名
g1_joint = H1_TO_G1_JOINT_MAP.get(h1_joint)
if g1_joint in g1_joint_pos_dict:
h1_joint_pos.append(g1_joint_pos_dict[g1_joint])
else:
# 如果没找到对应的G1关节(理论上不应该发生),使用0作为默认值
h1_joint_pos.append(0.0)
h1_obs.extend(h1_joint_pos)
# 3. 重排joint_vel部分 [49:86] -> [31:50]
g1_joint_vel = policy_obs_row[49:86] # G1的37个关节速度
g1_joint_vel_dict = dict(zip(g1_joint_names, g1_joint_vel)) # 构建G1关节名到速度的映射
# 为H1创建关节速度部分
h1_joint_vel = []
for h1_joint in h1_joint_names:
# 找到对应的G1关节名
g1_joint = H1_TO_G1_JOINT_MAP.get(h1_joint)
if g1_joint in g1_joint_vel_dict:
h1_joint_vel.append(g1_joint_vel_dict[g1_joint])
else:
# 如果没找到对应的G1关节,使用0作为默认值
h1_joint_vel.append(0.0)
h1_obs.extend(h1_joint_vel)
# 4. 重排actions部分 [86:123] -> [50:69]
g1_actions = policy_obs_row[86:123] # G1的37个关节动作
g1_actions_dict = dict(zip(g1_joint_names, g1_actions)) # 构建G1关节名到动作的映射
# 为H1创建动作部分
h1_actions = []
for h1_joint in h1_joint_names:
# 找到对应的G1关节名
g1_joint = H1_TO_G1_JOINT_MAP.get(h1_joint)
if g1_joint in g1_actions_dict:
h1_actions.append(g1_actions_dict[g1_joint])
else:
# 如果没找到对应的G1关节,使用0作为默认值
h1_actions.append(0.0)
h1_obs.extend(h1_actions)
# 确保输出向量维度为69
assert len(h1_obs) == 69, f"输出向量维度应为69,当前为{len(h1_obs)}"
return h1_obs至此,我们完成了G1到H1的观测映射!我们的流程:
G1观测->转换为H1观测->输入H1策略->得到H1动作(关节动作表)->映射为G1动作已经构建完成!
修改杂项参数,对齐G1到H1
在我们跑通这个迁移之前,我们还应调整G1的初始站姿,这非常重要,因为H1的策略都是从固定的站姿开始的,如果模型收到了未知的初始值,很可能返回随机的结果,这会让机器人在一开始就无法站住
G1_CFG = ArticulationCfg(
...
# 修改初始状态以匹配H1的配置
init_state=ArticulationCfg.InitialStateCfg(
pos=(0.0, 0.0, 0,74), # 高度不用改
joint_pos={
# 下肢关节 - 映射自H1
".*_hip_yaw_joint": 0.0, # 对应H1的 *_hip_yaw
".*_hip_roll_joint": 0.0, # 对应H1的 *_hip_roll
".*_hip_pitch_joint": -0.28, # 对应H1的 *_hip_pitch (-16度)
".*_knee_joint": 0.79, # 对应H1的 *_knee (45度)
".*_ankle_pitch_joint": -0.52, # 对应H1的 *_ankle (-30度)
".*_ankle_roll_joint": 0.0, # G1特有,H1没有,设为0
# 躯干关节
"torso_joint": 0.0, # 对应H1的 torso
# 上肢关节 - 映射自H1
".*_shoulder_pitch_joint": 0.28, # 对应H1的 *_shoulder_pitch
".*_shoulder_roll_joint": 0.0, # 对应H1的 *_shoulder_roll
".*_shoulder_yaw_joint": 0.0, # 对应H1的 *_shoulder_yaw
".*_elbow_pitch_joint": 0.52, # 对应H1的 *_elbow
".*_elbow_roll_joint": 0.0, # G1特有,H1没有,设为0
# 手部关节 - G1特有,保持原始值或设为中立位置
".*_five_joint": 0.0, # G1特有,设为中立位置
".*_three_joint": 0.0, # G1特有,设为中立位置
".*_six_joint": 0.0, # G1特有,设为中立位置
".*_four_joint": 0.0, # G1特有,设为中立位置
".*_zero_joint": 0.0, # G1特有,设为中立位置
"left_one_joint": 1.0, # 保持原配置中的值
"right_one_joint": -1.0, # 保持原配置中的值
"left_two_joint": 0.52, # 保持原配置中的值
"right_two_joint": -0.52, # 保持原配置中的值
},
...构建测试环境,跑通实验
在有了完整pipline之后,我们可以在Task1实验的基础上搭建测试环境
- 初始化环境为平地
- G1机器人观测
- 调用函数,将G1观测转换为H1观测
- 调用模型,将H1观测推理为H1动作
- 调用函数,将H1动作转换为G1动作
- 迭代仿真

实验的结果是,搭载H1策略的G1可以作出行走的动作:但他会在尝试走4-6步内因为身体前倾跌倒。
更多思考
搭载H1策略的G1机器人会在
- 开始时尝试走路
- 然后原地踏步
- 接着跌倒
说明策略在一开始还“有点用”,但接着无法适应新机器人的机械结构。
主要失败原因
关节补零的方式导致策略失效
我们把 H1 上不存在的关节在动作空间里置 0,这会让 G1 的这些关节“僵硬”或“悬空”,从而:
- 导致 G1 的质量分布和动态行为与 H1 差异较大
动力学差异
H1 和 G1 的质量分布、腿长、惯性张量、摩擦系数等都不同,即使观测空间和动作空间对齐,也不能保证策略能稳定迁移。
RL Fine-Tuning
-
保留原始策略网络结构和参数
-
把策略部署到 G1 的仿真环境中
-
使用与原来相同的强化学习算法继续训练策略,优化在 G1 上的表现
-
学习率要低一点,防止“忘记”原来的技能。
-
环境奖励函数要保持一致或稍作调整以适配 G1。
-
可以冻结部分网络层(如前几层),只训练输出层。